线程不安全的HashMap
常用的底层数据结构主要有数组和链表。数组存储区间连续,占用内存较多,寻址容易,插入和删除困难。链表存储区间离散,占用内存较少,寻址困难,插入和删除容易。 HashMap要实现的是哈希表的效果,尽量实现O(1)级别的增删改查。它的具体实现则是同时使用了数组和链表,可以认为最外层是一个数组,数组的每个元素是一个链表的表头
构造
- int initialCapacity 数组长度,假如未指定长度,默认构造长度为16的table数组,否则构造指定长度的两倍的长度的数组。
- 负载因子 当数据达到容量*负载因子时,hashMap会主动扩容至原来的两倍。默认为0.75
寻址方式
对于新插入的数据或者待读取的数据,HashMap将Key的哈希值对数组长度取模,结果作为该Node在数组中的index。并忘对应index的链表中插入数据。
优化的存储方式
当链表的长度超过8时,为了寻址和插入等操作的方便,HashMap会把对应index下的链表转换为红黑树进行存储。
final void treeifyBin(Node<K,V>[] tab, int hash) { int n, index; Node<K,V> e; if (tab == null || (n = tab.length) < MIN_TREEIFY_CAPACITY) resize(); else if ((e = tab[index = (n - 1) & hash]) != null) { TreeNode<K,V> hd = null, tl = null; do { TreeNode<K,V> p = replacementTreeNode(e, null); if (tl == null) hd = p; else { p.prev = tl; tl.next = p; } tl = p; } while ((e = e.next) != null); if ((tab[index] = hd) != null) hd.treeify(tab); } }线程不安全的主要原因:resize死循环&Fast-fail
- resize死循环
当HashMap的size超过Capacity*loadFactor时,需要对HashMap进行扩容。具体方法是,创建一个新的,长度为原来Capacity两倍的数组,保证新的Capacity仍为2的N次方,从而保证上述寻址方式仍适用。同时需要通过如下transfer方法将原来的所有数据全部重新插入(rehash)到新的数组中,如下可见,该HashMap的扩容其实是对链表做一个逆序操作的。当两个线程同时进行resize的时候,很有可能出现链表的死循环问题。
void transfer(Entry[] newTable, boolean rehash) { int newCapacity = newTable.length; for (Entry<K,V> e : table) { while(null != e) { Entry<K,V> next = e.next; if (rehash) { e.hash = null == e.key ? 0 : hash(e.key); } int i = indexFor(e.hash, newCapacity); e.next = newTable[i]; newTable[i] = e; e = next; } } } - 在使用迭代器的过程中如果HashMap被修改,那么ConcurrentModificationException将被抛出,也即Fast-fail策略。
当HashMap的iterator()方法被调用时,会构造并返回一个新的EntryIterator对象,并将EntryIterator的expectedModCount设置为HashMap的modCount(该变量记录了HashMap被修改的次数),
在通过该Iterator的next方法访问下一个Entry时,它会先检查自己的expectedModCount与HashMap的modCount是否相等,如果不相等,说明HashMap被修改,直接抛出ConcurrentModificationException。该Iterator的remove方法也会做类似的检查。该异常的为hashMap主动抛出的,意在提醒用户及早意识到线程安全问题
HashIterator() { expectedModCount = modCount; if (size > 0) { // advance to first entry Entry[] t = table; while (index < t.length && (next = t[index++]) == null) ; } }
- resize死循环
当HashMap的size超过Capacity*loadFactor时,需要对HashMap进行扩容。具体方法是,创建一个新的,长度为原来Capacity两倍的数组,保证新的Capacity仍为2的N次方,从而保证上述寻址方式仍适用。同时需要通过如下transfer方法将原来的所有数据全部重新插入(rehash)到新的数组中,如下可见,该HashMap的扩容其实是对链表做一个逆序操作的。当两个线程同时进行resize的时候,很有可能出现链表的死循环问题。
ConcurrentHashMap
ConcurrentHashMap的迭代中主要经历了两种方式的实现:
- Java 7基于分段锁的ConcurrentHashMap
- Java 8基于CAS的ConcurrentHashMap
Java 7基于分段锁的ConcurrentHashMap
Java 7中的ConcurrentHashMap的底层数据结构仍然是数组和链表。与HashMap不同的是,ConcurrentHashMap最外层不是一个大的数组,而是一个Segment的数组。每个Segment包含一个与HashMap数据结构差不多的链表数组。

寻址方式
在读写某个Key时,先取该Key的哈希值。并将哈希值的高N位对Segment个数取模从而得到该Key应该属于哪个Segment,接着如同操作HashMap一样操作这个Segment。为了保证不同的值均匀分布到不同的Segment,需要通过如下方法计算哈希值。
private int hash(Object k) { int h = hashSeed; if ((0 != h) && (k instanceof String)) { return sun.misc.Hashing.stringHash32((String) k); } h ^= k.hashCode(); h += (h << 15) ^ 0xffffcd7d; h ^= (h >>> 10); h += (h << 3); h ^= (h >>> 6); h += (h << 2) + (h << 14); return h ^ (h >>> 16); }同步方式
Segment继承自ReentrantLock,所以我们可以很方便的对每一个Segment上锁。 对于读操作,获取Key所在的Segment时,需要保证可见性。ConcurrentHashMap使用如下方法保证可见性,取得最新的Segment。
Segment<K,V> s = (Segment<K,V>)UNSAFE.getObjectVolatile(segments, u)获取Segment中的Node时也使用了类似方法
Node<K,V> e = (Node<K,V>) UNSAFE.getObjectVolatile (tab, ((long)(((tab.length - 1) & h)) << TSHIFT) + TBASE)对于写操作,并不要求同时获取所有Segment的锁,因为那样相当于锁住了整个Map。它会先获取该Key-Value对所在的Segment的锁,获取成功后就可以像操作一个普通的HashMap一样操作该Segment,并保证该Segment的安全性。 同时由于其它Segment的锁并未被获取,因此理论上可支持concurrencyLevel(等于Segment的个数)个线程安全的并发读写
size操作
put、remove和get操作只需要关心一个Segment,而size操作需要遍历所有的Segment才能算出整个Map的大小。为更好支持并发操作,ConcurrentHashMap会在不上锁的前提逐个Segment计算3次size,如果某相邻两次计算获取的所有Segment的更新次数(每个Segment都与HashMap一样通过modCount跟踪自己的修改次数,Segment每修改一次其modCount加一)相等,说明这两次计算过程中无更新操作,则这两次计算出的总size相等,可直接作为最终结果返回。如果这三次计算过程中Map有更新,则对所有Segment加锁重新计算Size.
public int size() { final Segment<K,V>[] segments = this.segments; int size; boolean overflow; // true if size overflows 32 bits long sum; // sum of modCounts long last = 0L; // previous sum int retries = -1; // first iteration isn't retry try { for (;;) { if (retries++ == RETRIES_BEFORE_LOCK) { for (int j = 0; j < segments.length; ++j) ensureSegment(j).lock(); // force creation } sum = 0L; size = 0; overflow = false; for (int j = 0; j < segments.length; ++j) { Segment<K,V> seg = segmentAt(segments, j); if (seg != null) { sum += seg.modCount; int c = seg.count; if (c < 0 || (size += c) < 0) overflow = true; } } if (sum == last) break; last = sum; } } finally { if (retries > RETRIES_BEFORE_LOCK) { for (int j = 0; j < segments.length; ++j) segmentAt(segments, j).unlock(); } } return overflow ? Integer.MAX_VALUE : size; }HashMap与jdk1.7下ConcurrentHashMap的区别
ConcurrentHashMap与HashMap相比,有以下不同点
- ConcurrentHashMap线程安全,而HashMap非线程安全
- HashMap允许Key和Value为null,而ConcurrentHashMap不允许
- HashMap不允许通过Iterator遍历的同时通过HashMap修改(会抛出异常),而ConcurrentHashMap允许该行为,并且该更新对后续的遍历可见
Java 8基于CAS的ConcurrentHashMap
实现
ConcurrentHashMap在构造上采用了更优秀的CAS操作来保证操作的原子性。对通过对数组和Node中引用使用volatile关键字来保证内存可见性。以及对put操作的
寻址方式
Java 8的ConcurrentHashMap同样是通过Key的哈希值与数组长度取模确定该Key在数组中的索引。
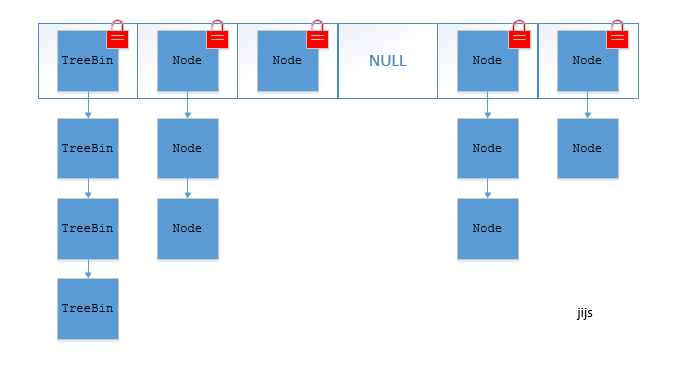
同步方式
Java 8的ConcurrentHashMap对数组使用volatile保证了内存可见性。并且对Node中的next引用使用同样的方式保证可见行。 对于put操作,如果Key对应的数组元素为null,则通过CAS操作将其设置为当前值。如果Key对应的数组元素(也即链表表头或者树的根元素)不为null,则对该元素使用synchronized关键字申请锁,然后进行操作。如果该put操作使得当前链表长度超过一定阈值,则将该链表转换为树,从而提高寻址效率。 对于读操作,由于数组被volatile关键字修饰,因此不用担心数组的可见性问题。同时每个元素是一个Node实例(Java 7中每个元素是一个HashEntry),它的Key值和hash值都由final修饰,不可变更,无须关心它们被修改后的可见性问题。而其Value及对下一个元素的引用由volatile修饰,可见性也有保障。
static class Node<K,V> implements Map.Entry<K,V> { final int hash; final K key; volatile V val; volatile Node<K,V> next; }size操作
put方法和remove方法都会通过addCount方法维护Map的size。
putVal的逻辑,使用了cas操作来进行插入
- 检查key/value是否为空,如果为空,则抛异常,否则进行2
- 进入for死循环,进行3
- 检查table是否初始化了,如果没有,则调用initTable()进行初始化然后进行 2,否则进行4
- 根据key的hash值计算出其应该在table中储存的位置i,取出table[i]的节点用f表示。 根据f的不同有如下三种情况:1)如果table[i]==null(即该位置的节点为空,没有发生碰撞), 则利用CAS操作直接存储在该位置,如果CAS操作成功则退出死循环。 2)如果table[i]!=null(即该位置已经有其它节点,发生碰撞),碰撞处理也有两种情况 2.1)检查table[i]的节点的hash是否等于MOVED,如果等于,则检测到正在扩容,则帮助其扩容 2.2)说明table[i]的节点的hash值不等于MOVED,如果table[i]为链表节点,则将此节点插入链表中即可 如果table[i]为树节点,则将此节点插入树中即可。插入成功后,进行 5
- 如果table[i]的节点是链表节点,则检查table的第i个位置的链表是否需要转化为数,如果需要则调用treeifyBin函数进行转化
remove方法的逻辑如下
- 先根据key的hash值计算书其在table的位置 i。
- 检查table[i]是否为空,如果为空,则返回null,否则进行3
- 在table[i]存储的链表(或树)中开始遍历比对寻找,如果找到节点符合key的,则判断value是否为null来决定是否是更新oldValue还是删除该节点。
size方法通过sumCount获取由addCount方法维护的Map的size。
public int size() {
long n = sumCount();
return ((n < 0L) ? 0 :
(n > (long)Integer.MAX_VALUE) ? Integer.MAX_VALUE :
(int)n);
}
final long sumCount() {
CounterCell[] as = counterCells; CounterCell a;
long sum = baseCount;
if (as != null) {
for (int i = 0; i < as.length; ++i) {
if ((a = as[i]) != null)
sum += a.value;
}
}
return sum;
}
Last 关于hashMap时间复杂度的问题
Hashmap中,get操作的时间复杂度应分为数组查找+链表(树)查询两步 理论最优化的复杂度为o(1),此时时间复杂度应为o(1)+o(1),也就是默认hash不冲突,实际复杂度应为O(1)+O(n) 当链表长度超过8时,链表会自动转化为红黑树,此时的时间复杂度为O(1)+O(log n)